Autonomous Visual Target Tracking
Association - Carnegie Mellon University
Motivation:
Demonstration of enhanced tracking capabilities of dexterous manipulators using visuo-motor control.
Application:
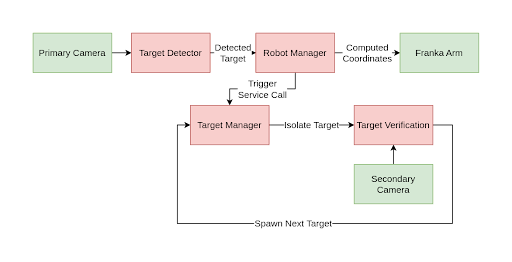
The main objective of this project was to develop a system that allows a robotic manipulator to interact with dynamically changing environments. The primary functionality involves detecting, tracking, and engaging with randomly moving objects displayed on a screen. The system efficiently follows each object and handle them in sequence, showcasing the manipulator's precision and adaptability.
Approach:
- Use Aruco markers for targets on a large display
- Track the markers by Visual Servoing using a Robot EF-fixed camera
- Verify tracking performance/register hit using a spotter system
- Spotter system: a independent vision-based hit validation system