Model Predictive Controller for Vehicle lane change and merge
Association - Carnegie Mellon University
Motivation:
The motivation for this project stems from the highways in the USA. When merging onto a highway from an exit, vehicles encounter heavy traffic, making it challeging for the ego vehicle to merge optimally.
Application:
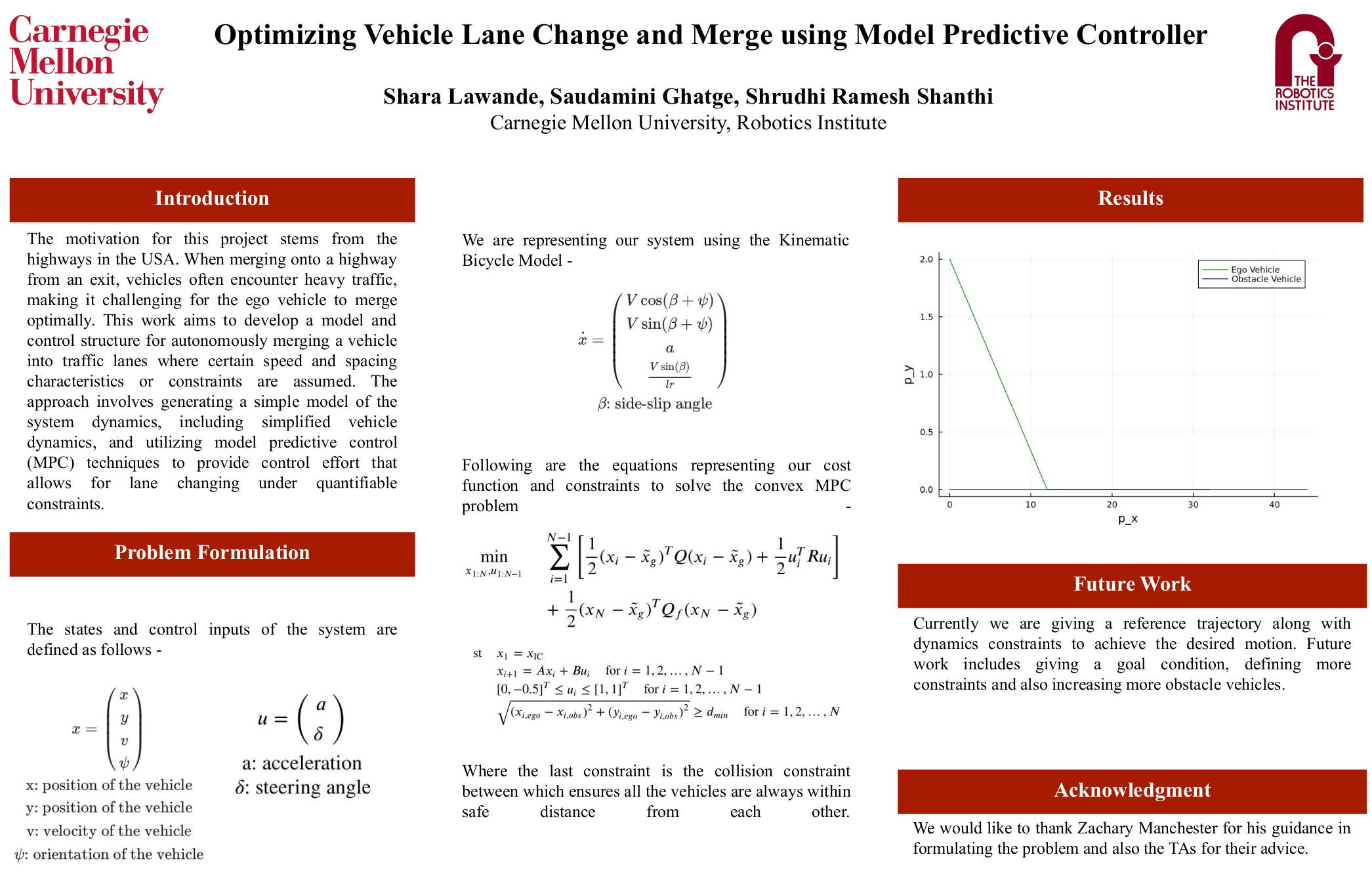
This work aims to develop a model and control structure for autonomously merging a vehicle into traffic lanes where certain speed and spacing constraints are assumed. The approach involves generating a simple model of the system dynamics, and utilizing model predictive control (MPC) techniques to provide control effort that allows for lane changing under quantifiable constraints